

Summary
This application note presents the appropriate application of the Vector® hybrid detector to the FHWA-developed, low-cost adaptive traffic control system, ACS-Lite. Vector employs both video and radar technologies, integrated in a single unit.
Facts about ACS-Lite Using a ‘Case Study’ Paradigm
In what may be the largest and most successful deployment of ACS-Lite in the USA, the Tyler (TX) traffic engineer has incrementally grown to eight individual systems crisscrossing his small city. Peter Eng, a
 retiree from the Texas Department of Transportation district office and longtime resident of Tyler, began working on his ‘next’ career as the city’s traffic engineer in 2009. Upon his arrival, a single, pre-existing ACS-Lite-equipped arterial corridor wasn’t working very well, and he made a few strategic operational and programming changes that converted it to a successful adaptive system. According to Mr. Eng, who prefers the descriptor ‘self-tuning’ instead of ‘adaptive’ for the ACS-Lite product, “This system is very good at making small adjustments on a cycle-by-cycle basis, but it needs to have a fairly good time-based coordination plan in place upon which to make those adjustments. Of equal importance, the system needs to have relatively long periods of time – a minimum of about 2 hours, typically – where the base plan remains in effect; otherwise, there is too great a proportion of time when cycle length transitioning is in play.” Once the first system was working well, Mr. Eng received the go ahead from city management and Council members to similarly equip additional corridors that were experiencing congestion.
retiree from the Texas Department of Transportation district office and longtime resident of Tyler, began working on his ‘next’ career as the city’s traffic engineer in 2009. Upon his arrival, a single, pre-existing ACS-Lite-equipped arterial corridor wasn’t working very well, and he made a few strategic operational and programming changes that converted it to a successful adaptive system. According to Mr. Eng, who prefers the descriptor ‘self-tuning’ instead of ‘adaptive’ for the ACS-Lite product, “This system is very good at making small adjustments on a cycle-by-cycle basis, but it needs to have a fairly good time-based coordination plan in place upon which to make those adjustments. Of equal importance, the system needs to have relatively long periods of time – a minimum of about 2 hours, typically – where the base plan remains in effect; otherwise, there is too great a proportion of time when cycle length transitioning is in play.” Once the first system was working well, Mr. Eng received the go ahead from city management and Council members to similarly equip additional corridors that were experiencing congestion.
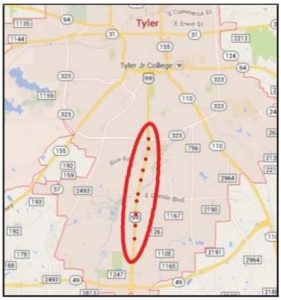
The biggest challenge was on the city’s loop corridor, where the 29 intersections to be coordinated far outstripped ACS- Lite’s 16-intersection limit for a single system. Undeterred, Mr. Eng split this long corridor into 3 separate but abutting systems. Because of ACS-Lite’s
 clever operational architecture, where the first signal in the system is still gathering traffic flow data from the external link in order to make its adaptive timing adjustment decisions, these 3 systems work together seamlessly and often carry platoons through these system boundaries without stopping. [Note: Tyler, at 100,000 population, is the largest city in Texas that has no controlled-access freeways within its city limits. As a result, the traffic volume levels on Tyler’s arterial streets are greater than would be expected for a city this size; its loop carries about 40,000 vehicles daily.]
clever operational architecture, where the first signal in the system is still gathering traffic flow data from the external link in order to make its adaptive timing adjustment decisions, these 3 systems work together seamlessly and often carry platoons through these system boundaries without stopping. [Note: Tyler, at 100,000 population, is the largest city in Texas that has no controlled-access freeways within its city limits. As a result, the traffic volume levels on Tyler’s arterial streets are greater than would be expected for a city this size; its loop carries about 40,000 vehicles daily.]
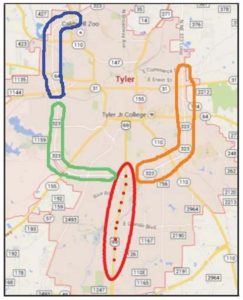
Closed-loop systems are designed for arterial corridors, where the overriding goal is successfully progressing platoons through multiple
 intersections, cycle after cycle. They typically are not well-suited for grids of crossing arterial roadways. However, Tyler’s eight separate systems cross in several places, and the two (or three) ACS-Lite systems in each of those cases have been programmed in such a way as to tie them together. The common intersection is located in only one of the systems, but its offset is tied down (that is, not able to be adaptively adjusted) so that the crossing system’s coordination “green window” is constant for the duration that the timing plan is in effect. The crossing corridor is able to adjust offsets and splits, but since it is sensing the time-space arrival of platoons, it also progresses its platoons through this ‘ghost’ intersection. Since these common intersections were typically the highest-volume (i.e., busiest) in both corridors, there was no efficiency lost by ‘locking them down’ timing-wise.
intersections, cycle after cycle. They typically are not well-suited for grids of crossing arterial roadways. However, Tyler’s eight separate systems cross in several places, and the two (or three) ACS-Lite systems in each of those cases have been programmed in such a way as to tie them together. The common intersection is located in only one of the systems, but its offset is tied down (that is, not able to be adaptively adjusted) so that the crossing system’s coordination “green window” is constant for the duration that the timing plan is in effect. The crossing corridor is able to adjust offsets and splits, but since it is sensing the time-space arrival of platoons, it also progresses its platoons through this ‘ghost’ intersection. Since these common intersections were typically the highest-volume (i.e., busiest) in both corridors, there was no efficiency lost by ‘locking them down’ timing-wise.
The next version of ACS-Lite will possibly allow for cycle-by-cycle adjustment of the cycle length itself for the first time. Despite this advanced capability, Tyler’s need to maintain these aforementioned common intersections of crossing systems as lynch-pins makes it probable that it won’t upgrade to the newer system algorithms. “These self-tuning systems are ideal for my city,” says Mr. Eng. “I have plans to implement ACS-Lite on only two or three more arterial corridors that are experiencing enough congestion to benefit from split and offset adjustments in real time. The remainder of the city’s signalized intersections – roughly one-third of the total – work fine either as isolated actuated signals or as simple time-based coordination groups.”
Vantage Vector ~and~ ACS Lite: A Perfect Match
During the incremental process of installing the 8 ACS-Lite systems, the City evolved on the technology solution it used for the setback detection on the arterial approaches that are a requirement of this adaptive system. The midblock detectors’ purpose is to collect time-stamped detector actuations of free-flowing traffic approaching the intersection so as to detect the presence of platoons. For busy intersections that have great demand, it is often possible for long queues to build up. There is no magic setback distance, but these detections need to occur as far away from the intersection as possible so that the queuing congestion does not come into play. In Tyler’s case, the setback detection zones were approximately 400 feet back from the stopline.
- The inaugural ACS-Lite system that was deployed in Tyler
 utilized solar-powered, side-fire radar units coupled with a radio communications link to the signal This first system’s mid-block detectors never were able to provide satisfactorily robust midblock detection to the controller, possibly because of radio interference. If they had been a technological success, they would have also been a good solution, because one midblock radar unit could capture lane- by-lane detector actuations not only for the intersection’s approach, but also for the far lanes flowing in the opposite direction. These reverse flow data, sent to the first intersection’s controller (and then forwarded on to the ACS- Lite central system processor) could be ‘mapped’ to the next intersection up the arterial.
utilized solar-powered, side-fire radar units coupled with a radio communications link to the signal This first system’s mid-block detectors never were able to provide satisfactorily robust midblock detection to the controller, possibly because of radio interference. If they had been a technological success, they would have also been a good solution, because one midblock radar unit could capture lane- by-lane detector actuations not only for the intersection’s approach, but also for the far lanes flowing in the opposite direction. These reverse flow data, sent to the first intersection’s controller (and then forwarded on to the ACS- Lite central system processor) could be ‘mapped’ to the next intersection up the arterial. - Beginning with the second system deployed, the traffic engineer elected to deploy two VIDS cameras looking at each arterial The first camera was aimed in the vicinity of the stopline, and it provides live vehicle calls used for phase demand and phase extension. The second VIDS camera, mounted at maximum possible height on the combination pole’s luminaire mast arm, was aimed as far back down the approach as possible, and these vehicle actuations were fed to ACS-Lite’s adaptive adjustment algorithms.

- When Iteris released the Vector detector in 2011, the Tyler traffic engineer immediately modified his standard deployment for ACS-Lite corridors to use this single unit in place of the pair of VIDS cameras that was his previous best solution. The radar detection component within Vector robustly detects vehicles up to 600 feet distant from the The low-profile unit does not require any extra elevation for the long-distance detection, and thus can be mounted flush on top of the signal mast arm. The cost was lower than having two video cameras installed on the approach, the setback detection distance was actually increased for better ACS-Lite effectiveness, and the traffic engineer also liked the ‘bonus’ of a less-cluttered traffic signal mast arm.

Key Deployment Features of Vector in an ACS Lite System
Vector is a multi-talented detection tool that traffic management professionals can use in a variety of ways. Tyler used Vector as a combination stopline (video-based) and setback (radar-based) detection zone creation ITS device, as follows:
- The setback detection is achieved by Vector’s radar Vector is set in tripline mode, and the distance was normally set at 500 feet. This is a bit less than Vector’s 600-foot range, and was set by the traffic engineer to give more confidence in the detection accuracy. These pulse detection calls were forwarded by the controller to the ACS-Lite central server, for use as inputs to its adaptive algorithms.
- The midblock tripline sensor is positioned to catch free-flowing traffic. If 500 feet back is too close to the next intersection, traffic may not have gotten up to speed at that point. In those cases, Vector’s tripline location was brought nearer, as judged appropriate by the traffic These tripline locations are programmed in the ACS-Lite user interface by setting the travel time between that tripline and the intersection stopline.
- Stopline presence detection was set up the same way as any other Vantage Zones having lengths of 15 feet were drawn in each lane just behind the stopline. These were tied to the phase calls in the controller.
- Video detection zones of 6-by-6 feet size were also established in front of the stopline in some cases to aggregate 15-minute traffic volumes for each
- Bicycle detection was also set up in each lane behind the stopline so that bikes could be differentially These resulting presence detector actuations were extended by user- set time durations in the Vector processor, so as to give bicycles longer passages through the intersections for clearance safety.
Please see the Iteris Resource Center at www.iteris.com/support for more information on Vantage Vector.
[Download not found]